Unsupervised Reinforcement Learning via World Models
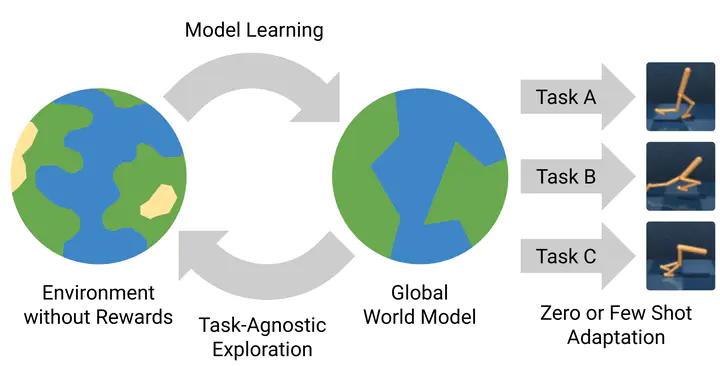 Planning to Explore
Planning to Explore
- Designing a model-based reinforcement-learning approach via world models using a novel combination of intrinsic and sparse extrinsic reward for robotic manipulation tasks in MetaWorld and adapting to new tasks exploiting prior experience.
- Advisors: Kostas Daniilidis and Oleg Rybkin
Benedict Florance Arockiaraj
ML Engineer
My research interests are at the juncture of deep learning and computer vision.